IEEE/RSJ International Conference on Intelligent Robots and Systems in Japan: Greet the robot like a human – with a handshake
2023/02/15
A joint research of the chair of Marketing and Human Resource Management, Prof. Dr. Dr. Stock-Homburg, Department of Law and Economics, Institute for Business Administration and the chair of Intelligent Autonomous Systems, Prof. Dr. Peters, Computer Science Department addresses the dynamics of Human-Robot Interaction.
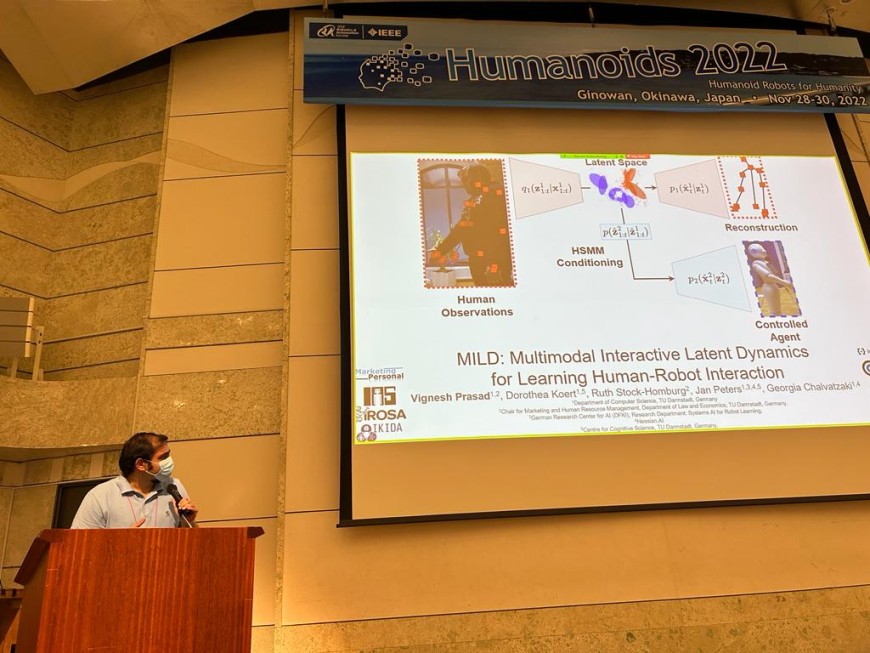
The IEEE/RSJ International Conference on Intelligent Robots and Systems in Japan is one of the largest and most impacting robotics research conferences worldwide. Vignesh Prasad, M.Sc. and research associate, presented this research on Multimodal Interactive Latent Dynamics (MILD) to enable a better modeling of dynamics at this conference.
The experimental evaluations on different test scenarios show the efficacy of MILD in capturing coherent latent dynamics, both in predicting Human-Human Interaction and in generating controls for Human-Robot Interactions on different robots, compared to the state-of-the art method that implicitly learns shared representations. MILD learns to generate effective robot trajectories for Human-Robot Interaction, not only through robot kinesthetic teaching, but also by learning from Human-Human Interaction, both from idealistic data (Motion Capture) and noisy RGB-D skeleton tracking, by directly transferring the generated trajectories to a humanoid robot without requiring additional demonstrations or fine-tuning.

